[video] Justin Bayer - 2018-07-26, 17:00
ML Research Lab, Volkswagen Group

Title
Approximate Bayesian inference in spatial environments
Abstract
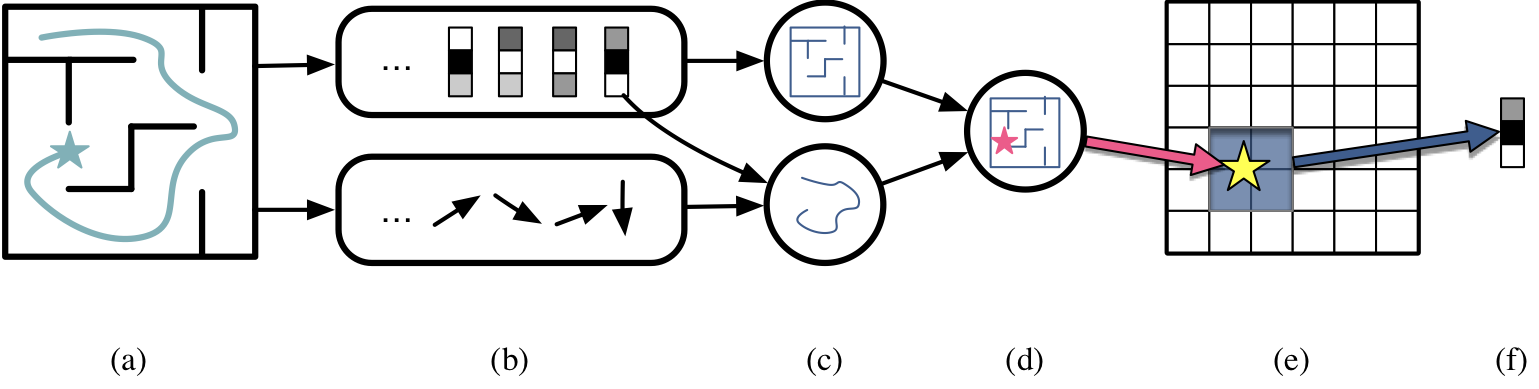
While purely data-driven methods have been an outstanding success story in the recent years, the injection of prior knowledge into our models is a viable mean to reduce the hunger for data of our algorithms. In this talk, we will do so by augmenting stochastic deep and recurrent models with an explicit map to tackle the problem of learning the spatial surroundings of an agent. Using variational Bayes and neural networks as our basic machinery, the resulting model let’s us solve certain inference problems such as simultaneous localisation and mapping, autonomous exploration or control in a single model.
Registration